集成應用解決方案_上海東升安川機器人科技有限公司")
微信掃一掃 可直接咨詢
ABB噴涂機器人
ABB噴涂機器人 IRB 52/1.2

- 詢價
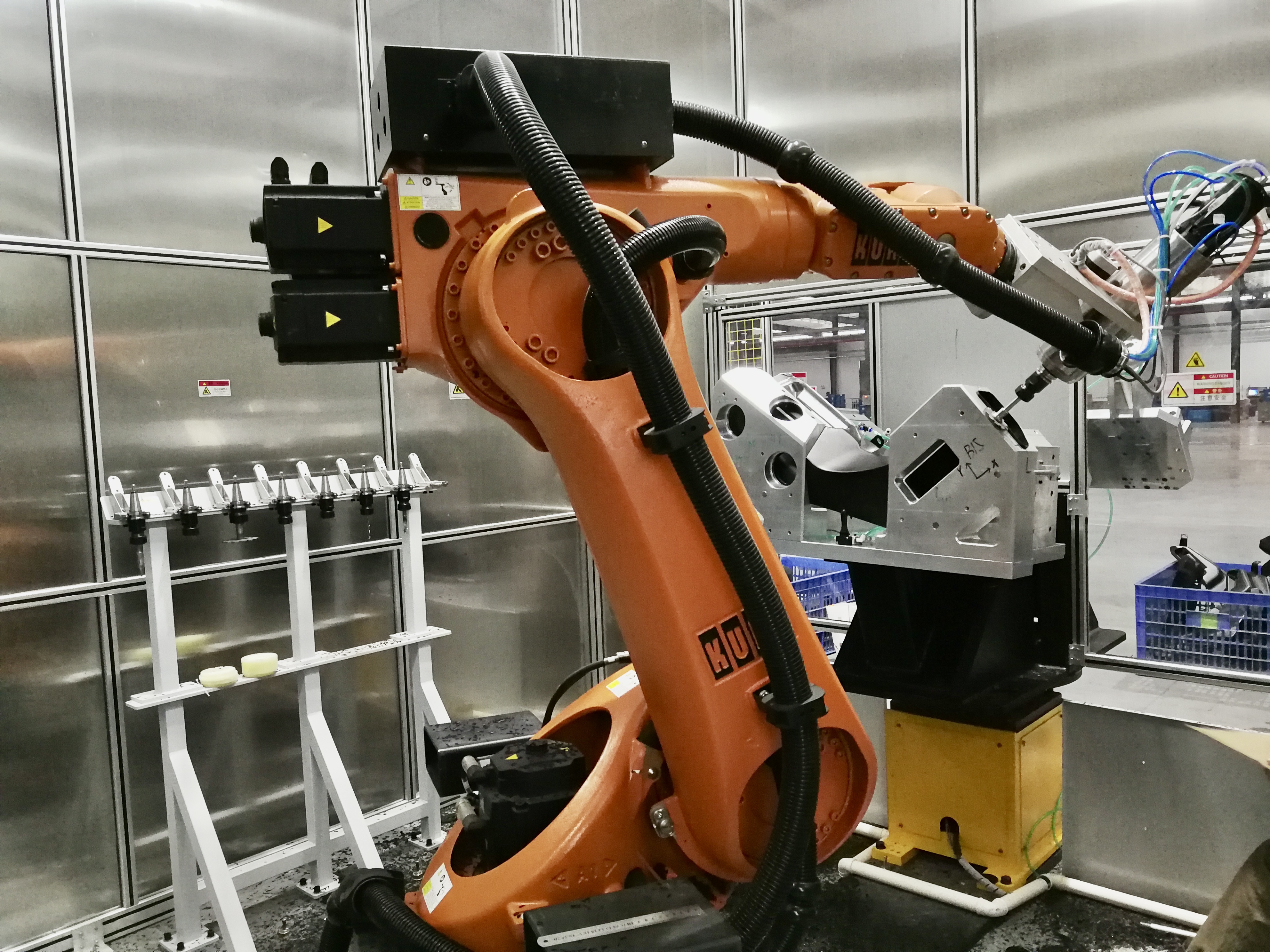
噴涂機器人
噴涂機器人是可進行自動噴漆或噴涂其他涂料的工業(yè)機器人,主要由機器人本體、計算機和相應的控制系統(tǒng)組成,液壓驅(qū)動的噴涂機器人還包括液壓油源,如油泵、油箱和電機等。噴涂機器人主要應用于3C行業(yè)、汽車制造業(yè)以及家具行業(yè),未來將大量代替人工。
噴涂機器人的選型因素:
(1) 機器人的工作軌跡范圍。在選擇機器人時需保證機器人的工作軌跡范圍必須能夠完全覆蓋所需施工的工件相關(guān)表面、左右兩臺機器人各覆蓋左右半個工件,當機器人的工作軌跡范圍在輸送運動方向上無法滿足時,則需要增加機器人的外部導軌,來擴展其工作范圍軌跡。
(2) 機器人的重復精度。對于涂膠機器人而言,一般重復精度達到0.5mm即可。而對于噴漆機器人,重復的精度要求可以低一些。
(3) 機器人的運動速度及加速度。機器人的最 大運動速度或最 大加速度越大,則意味著機器人在空行程所需的時間越短,則在一定節(jié)拍內(nèi)機器人的絕 對施工時間越長,可提高機器人的使用率。所以機器人的最 大運動速度及加速度也是一項重要的技術(shù)指標。但需注意的問題是,在噴涂過程中(涂膠或噴涂),噴涂工具的運動速度與噴涂工具的特性及材料等因素直接相關(guān),需要根據(jù)工藝要求設定。此外,由于機器人的技術(shù)指標與其價格直接相關(guān),因而根據(jù)工藝要求選擇性價比高的機器人。
(4) 機器人手臂可承受的最 大荷載。對于不同的噴涂場合,噴涂(涂膠或噴漆)過程中配置的噴具不同,則要求機器人手臂的最 大承載載荷也不同。
在噴涂行業(yè)應用中有著大量的噴涂機器人應用經(jīng)驗,可以滿足不用的工件噴漆要求,各種自動噴涂作業(yè)方式:
1、 如轉(zhuǎn)臺式:適合獨 立的手噴柜改造使用、可以滿足噴漆(含靜電噴漆方式)人工只需要將產(chǎn)品放置在雙工位轉(zhuǎn)臺外部,機器人自動噴涂這種噴漆方式是目前較為常用和應用較為廣 泛的一種。轉(zhuǎn)臺將噴漆完成和未完成產(chǎn)品實現(xiàn)轉(zhuǎn)換,實現(xiàn)自動化生產(chǎn)。適合小件擺盤、模型噴漆、工業(yè)品、鎖具、手機殼、玩具、鞋材、鼠標、鍵盤、發(fā)光字體、醫(yī)療配件、體育用品、汽車內(nèi)飾、后視鏡、塑膠五金等噴漆,一米五以內(nèi)的產(chǎn)品噴漆使用廣 泛。
2、 固定機器人懸掛式:適合產(chǎn)品通過地軌線,地面輸送線等應用方式,也可以用于空間場地較小的情況下使用轉(zhuǎn)臺方式。
3、 在線跟蹤噴涂方式:適用于懸掛線噴漆和噴糞生產(chǎn)改造方式,工業(yè)機器人帶追蹤噴涂功能,根據(jù)實際情況可以增加導軌進行輔助,可使自動噴涂機器人左右移動一定的距離。
靜電噴粉噴塑:靜電粉末噴涂是一種用霧化噴嘴(涂層霧化)和放電階段(電流)對涂層進行微粒化、對其施加電荷、在電極與圖層物體之間形成電場、利用靜電吸附來涂覆涂層噴涂工藝。主要用于金屬表面涂裝隨著工業(yè)噴涂的使用,噴粉環(huán)境的惡劣讓企業(yè)老板都在逐步采用工業(yè)機器人(機械手)來滿足噴涂自動化生產(chǎn),代替人工作業(yè),降低企業(yè)招人和用人管理等壓力,靜電噴粉設備-自動噴塑機器人通常使用六軸多關(guān)節(jié)類型機械手,可以模擬人工完成一些異性件,不規(guī)則產(chǎn)品的噴涂。
自動噴塑機器人(五金柜體結(jié)構(gòu)件噴粉機器人設備案例):
1、 噴粉作業(yè)方式:通常是懸掛線移動噴粉,進入噴粉房后人工噴粉,采用噴粉機器人后由機器人機械手臂代替人工噴粉動作,配套靜電噴粉設備這套實現(xiàn)自動化控制出粉噴涂。
2、 噴涂機器人:一般需要兩套,呈現(xiàn)斜對面安裝,滿足工件的正面噴粉和反面噴粉,如線體速度越快需要的工業(yè)機器人越多。
3、 追蹤功能:由于線體一直處于流動狀態(tài)下,噴塑機器人需要具備在線跟隨噴粉的功能,是指工業(yè)機器人的軌跡動作是根據(jù)線體移動速度而在邊移動邊走程序。
4、 配套設備:噴涂機器人;靜電供粉系統(tǒng);靜電噴粉槍;在線追蹤系統(tǒng);底座以及防護衣。